- 10 آبان 1402
- by: مدیر سایت
برای سیستمهای تحریک و AVR مورد استفاده در ژنراتورها، گزینههای مختلفی توسط تولیدکنندگان ارائه میشود که انتخاب مناسب از میان این گزینهها، برای عملکرد صحیح ژنراتور بسیار مهم میباشد. هر سیستم تحریک، ویژگیهای منحصر به فرد و مزایا و معایب خاص خود را به دنبال دارد. انتخاب سیستم تحریک معمولا براساس مشخصههای الکتریکی بارها و الزامات عملکرد ژنراتور در هنگام اتصال کوتاه مشخص میشود. در این مقاله چهار روش مورد استفاده برای سیستم تحریک ژنراتور معرفی و مزایا و معایب هر روش مورد بررسی قرار میگیرند و پیشنهاداتی برای انتخاب درست سیستم تحریک بر اساس الزامات کاربری موتور ژنراتور یا دیزل ژنراتور ارائه میگردد.
انواع سیستمهای تحریک
رایجترین سیستمهای تحریک بدون جاربک شامل چهار روش ذیل میگردند:

هریک از سیستمهای تحریک فوق، ویژگیهای خاص خود را داشته که در این مقاله قصد داریم ساختمان، عملکرد و انواع کاربریهای مناسب برای هر روش را مورد بررسی قراردهیم. اما پیش از معرفی انواع سیستمهای تحریک، لازم است فرآیند کلی و مکانیزم عملکرد این سیستم تحریک در ژنراتور معرفی گردد.
عملکرد سیستم تحریک
برای تولید ولتاژ در سیمپیچهای استاتور یک ژنراتور سنکرون، لازم است یک جریان DC به سیمپیچ روتور اعمال شود که با چرخش میدان مغناطیسی ناشی از این جریان DC با سرعت سنکرون، درون سیمپیچهای استاتور ولتاژ AC سه فاز القا گردد. توان مورد نیاز سیستم تحریک توسط یکی از روشهای فوق تامین و به AVR اعمال شده و پس از انجام یکسوسازی در داخل AVR، ولتاژ DC خروجی آن به سیمپیچ میدان تحریک اعمال میگردد. نتیجه اعمال این ولتاژ DC به سیمپیچ میدان تحریک و چرخش روتور، القای یک ولتاژ AC در آرمیچر تحریک میباشد که بر روی روتور ژنراتور اصلی قرار دارد.
این ولتاژ پس از یکسوسازی توسط دیودهای گردان به سیمپیچ روتور اصلی ژنراتور اعمال شده و میدان مغناطیسی مورد نیاز جهت القای ولتاژ در سیمپیچهای استاتور را فراهم میکند.
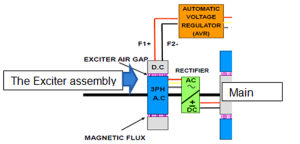
شکل 1-دیاگرام سیمپیچ میدان و آرمیچر تحریک
فرآیند کلی تامین توان مورد نیاز میدان تحریک شامل چهار گام به شرح زیر میباشد:
- نمونه ولتاژ AVR از خروجی سیمپیچهای استاتور اصلی ژنراتور گرفته میشود تا میدان تحریک در ژنراتور را کنترل کند و ولتاژ خروجی ژنراتور تحت بارهای متغیر توسط AVR ثابت نگهداشته شود.
- AVR توان ورودی مورد نیاز خود را از طریق یکی از روشهای مورد استفاده برای سیستم تحریک که در این مقاله تشریح میگردد، دریافت میکند.
- خروجی AVR برای تامین توان DC میدان تحریک به استاتور ژنراتور تحریک (سیمپیچ میدان) متصل شده و AVR با اندازهگیری سطح ولتاژ خروجی استاتور ژنراتور اصلی، ولتاژ القا شده در رتور ژنراتور تحریک (آرمیچر تحریک) را تنظیم میکند.
- ولتاژ AC القا شده در آرمیچر تحریک بوسیله یک یکسوساز دیودی به ولتاژ DC تبدیل شده و پس از اعمال به رتور ژنراتور اصلی، داخل سیمپیچهای استاتور ژنراتور، ولتاژ AC القا میکند.
به منظور عملکرد صحیح فرآیند فوق AVR باید برای تامین جریان تحریک در حالات مختلف مخصوصا در حالات گذرا، یک منبع توان قدرتمند و کافی در اختیار داشته باشد و تفاوت سیستمهای تحریک مختلف در روش تامین این توان میباشد. بدون این منبع توان، ممکن است سیستم در بازیابی ولتاژ در حین استارت الکتروموتورها و یا حالات خطاها دچار مشکل شده و این امر میتواند منجر به آسیب الکتروموتورها در لحظه استارت و خاموش شدن ژنراتور به دلیل از دست رفتن تحریک گردد.
1- سیستم تحریک موازی (Shunt)
در سیستم تحریک موازی از خروجی استاتور اصلی برای تامین توان ورودی AVR استفاده میشود. همچنین از همین ولتاژ خروجی به عنوان نمونه برای سنجش و تنظیم ولتاژ تحریک نیز استفاده میگردد. به همین علت به این سیستمها، خود تحریک نیز گفته میشود.

شکل 2- مکانیزم عملکرد سیستم تحریک Shunt
سیستم تحریک موازی (Shunt)، یکی از روشهای ساده و مقرونبهصرفه در تامین توانی است که AVR برای ایجاد میدان تحریک در رتور احتیاج دارد. این روش به تجهیزات و یا سیمبندی اضافی احتیاجی نداشته و عیبیابی آن بسیار راحت میباشد. سادگی سیستم تحریک Shunt دلیل بزرگترین نقطه ضعف این سیستم نیز میباشد. زیرا کیفیت توان ورودی AVR مستقیماً تحت تاثیر بارهای تغذیه شونده توسط ژنراتور میباشند. هنگامی که یک حالت گذرا مانند استارت الکتروموتور و یا خطا در بارهای تغذیه شونده رخ دهد، ولتاژ و فرکانس دچار افت شده و AVR باید برای بازیابی ولتاژ، جریان تحریک بیشتری تولید کند. از آنجایی که تغذیه AVR مستقیما از خروجی استاتور ژنراتور اصلی انجام میشود، تامین توان مورد نیاز AVR در هنگام افت فرکانس و ولتاژ میتواند بسیار چالش برانگیز باشد. مخصوصا در هنگام اتصال کوتاه که ولتاژ دچار فروپاشی میگردد. در این حالت بدلیل احتمال از دست رفتن میدان تحریک در ژنراتور، AVR ممکن است نتواند تا زمان برطرف شدن خطا در شبکه پایین دستی، ولتاژ خروجی ژنراتور را حمایت کند. هارمونیکهای ناشی از تغذیه بارهای غیرخطی نیز میتواند برای سیستم تحریک Shunt چالش برانگیز باشند.
2- سیستم تقویت تحریک (EBS)
EBS شکل دیگری از سیستمهای تحریک Shunt میباشد که در آن یک «تقویتکننده» به سیستم اضافه شده است. ساختار این سیستمهای تحریک از لحاظ سنجش ولتاژ خروجی و توان ورودی AVR مشابه سیستم تحریک Shunt بوده با این تفاوت که در سیستم تحریک EBS یک ماژول کنترل تقویت تحریک (EBC) و یک ژنراتور تقویت تحریک (EBG) در انتهای ژنراتور تعبیه شده است. ماژول کنترلی EBC به AVR متصل بوده و این امکان را به AVR میدهد که بسته به نیاز سیستم، سطوح مختلف و متغیر جریان تحریک مورد نیاز را تامین کند. همانگونه که در شکل (3) مشاهده میگردد توان خروجی ژنراتور تقویت تحریک، با خروجی AVR موازی شده و در صورت نیاز، EBC فرمان مشارکت در تامین توان مورد نیاز AVR را به ژنراتور تقویت تحریک ارسال میکند. در هنگام بروز خطا در شبکه پاییندستی یا استارت الکتروموتورها، توان ژنراتور تقویت تحریک (EBG) به خروجی AVR اعمال شده و ضمن تقویت میدان تحریک، ولتاژ خروجی ژنراتور را بازیابی میکند.
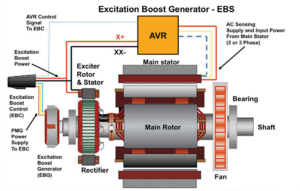
شکل 3- مکانیزم عملکرد سیستم تحریک EBS
اگرچه ژنراتور تقویت تحریک در سیستم EBS مشابه ژنراتور مغناطیس دائم مورد استفاده در سیستم تحریک PMG میباشد، اما این ژنراتور برای تامین پیوسته توان AVR مناسب نبوده و برای استفاده در زمانهای کوتاهتر در نظر گرفته میشود. در هنگام استارت و راهاندازی موتور ژنراتور نیز برای جلوگیری از افزایش ولتاژ اولیه تحریک، EBS در حالت خاموش میباشد و ولتاژ تولید شده توسط ژنراتور تقویت کننده برای ایجاد میدان تحریک استفاده نمیشود. ساختار سیستم EBS امکان پاسخ دینامیکی در شرایطی مانند اتصال کوتاه و یا استارت الکتروموتور را فراهم میکند و همین امر سیستم تحریک EBS را از PMG متمایز میکند. سیستم تحریک EBS که برای کاربریهای کوتاه مدت مناسب میباشد، به لحاظ اقتصادی مقرون به صرفهتر بوده و ابعاد کوچکتری نسبت به PMG دارد که قادر است ولتاژ تحریک را تا در هنگام وقوع اتصال کوتاه به میزان 300 درصد جریان نامی پشتیبانی کند و راه اندازی الکتروموتورها را بهبود بخشد.
3- ژنراتور آهنربای دائم (PMG)
یکی از معروفترین روشهای مورد استفاده در سیستم تحریک ژنراتورهای براشلس، استفاده از ژنراتور آهنربای دائم برای تامین میدان تحریک میباشد. در این روش یک ژنراتور کوچک از نوع آهنربای دائم برای تامین توان مورد نیاز AVR در انتهای ژنراتور اصلی قرار میگیرد. خروجی این ژنراتور آهنربای دائم از اغتشاشات خروجی استاتور ژنراتور اصلی ایزوله بوده و تا زمانی که محور ژنراتور در حال گردش باشد، یک شکل موج سهفاز بدون اعوجاج تولید میکند که به AVR اعمال میگردد. در سیستم تحریک PMG بر خلاف سیستم تحریک Shunt، شکل موج ورودی AVR هیچگونه اعوجاجی ندارد. سیستم تحریک PMG برای راه اندازی الکتروموتورها و بارهای غیرخطی مزایای زیر را ارائه میدهد:
- عدم تاثیر بارهای غیرخطی بر توان سیستم تحریک
- ایجاد ولتاژ قدرتمند در هنگام راهاندازی ژنراتور به جای تکیه بر پسماند مغناطیسی
- ایزوله شدن سیستم تحریک از حالات گذرای ناشی از استارت الکتروموتورها
- در هنگام وقوع اتصال کوتاه، سیستم تحریک PMG با پشتیبانی از ولتاژ تحریک، اجازه از دست رفتن تحریک را نداده تا خطا در بارهای پایین دست و توسط تجهیزات حفاظتی برطرف شود. (فراهم کردن امکان Selective Coordination)
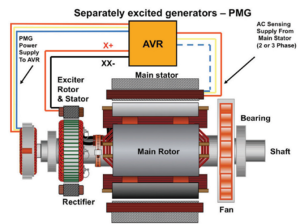
شکل 4- مکانیزم عملکرد سیستم تحریک PMG
با وجود اینکه سیستم تحریک PMG نسبت به سایر سیستمهای تحریک دارای وزن، ابعاد و پیچیدگی بیشتری میباشد اما با این حال رایجترین سیستم تحریک برای کاربریهایی است که به بهترین عملکرد در راه اندازی الکتروموتورها، حفاظت انتخابی و بارهای غیر خطی نیاز دارند.
4- سیمپیچ جانبی (AUX)
سیمپیچ جانبی یک روش متفاوت برای سیستم تحریک ژنراتور است که سالها در مصارف مختلفی مانند کاربریهای دریایی و صنعتی مورد استفاده قرار گرفته است. اگرچه امروزه روش سیمپیچ جانبی کمتر مورد استفاده قرار میگیرد، اما فناوری جدیدی نبوده و بیشتر در تاسیسات بزرگ مورد استفاده قرار میگیرد. در سیستم تحریک سیمپیچ جانبی (AUX) توان ورودی AVR از طریق میدان اصلی تولید شده داخل سیمپیج مجزایی که بر روی استاتور قرار گرفته، تامین میشود. سیمپیچ جانبی یک سیمپیچ تکفاز بوده که در داخل استاتور و کنار سیمپیچ خروجی اصلی تعبیه شده است. سیستم تحریک AUX برخلاف سیستم تحریک PMG، نیازی به قراردادن یک ژنراتور در انتهای ژنراتور اصلی ندارد. همچنین مشکلات سیستم تحریک Shuntمانند ایجاد هارمونیک ناشی از تغذیه بارهای غیرخطی و ثابت نبودن ولتاژ اعمال شده به AVR در هنگام حالات گذرا را ندارد. سیستمهای تحریک سیمپیچ جانبی (AUX) ساخت شرکت کامینز پاور، از سه عدد سیمپیچ که به صورت سری به یکدیگر متصل شدهاند تشکیل شده است. در شرایط کاری نرمال، سیستم تحریک از هارمونیک اول برای تامین توان مورد نیاز AVR استفاده میکند. اما در شرایط اتصال کوتاه و راه اندازی الکتروموتورها، هارمونیک سوم میدان که در این شرایط به سرعت افزایش مییابد، تامین کننده اصلی توان AVR خواهد بود. استفاده از دو هارمونیک برای تامین توان مورد AVR باعث میشود که سیستم تحریک در شرایطی مانند اتصال کوتاه و یا استارت الکتروموتور، از ولتاژ ژنراتور تا مقدار 300 درصد جریان نامی و برای مدت 10 ثانیه پشتیبانی کند که فراتر از احتیاج سیستم قدرت میباشد. از آنجایی که سیستم تحریک AUX در مقایسه با PMG تجهیزات کمتری دارد، باعث کاهش ابعاد ژنراتور و متعاقباً قیمت تمام شده آن نیز میشود. در سیستمهای تحریک AUX ابعاد طولی ژنراتور کوچکتر و تجهیزات بکار رفته در آن نسبت به سیستمهای تحریک PMG کمتر میباشد، لذا قیمت تمام شده ژنراتورهایی که از سیستم تحریک AUX بهره میبرند از ژنراتورهایی که از سیستم تحریک PMG استفاده میکنند،کمتر است. همچنین امکان خرابی در این سیستمها بسیار پایین میباشد.
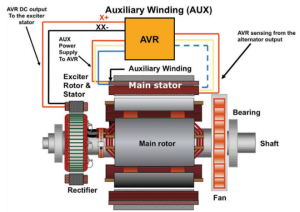
شکل 5-مکانیزم سیستم تحریک AUX
طراحی سیستمهای تحریک AUX به گونهای صورت میگیرد که اندوکتانس متقابل میان سیمپیچ جانبی و سیمپیچ استاتور اصلی در حداقل مقدار ممکن خود باشد تا اعوجاجات ناشی از بارهای غیر خطی متصل به خروجی استاتور، بر روی عملکرد AVR تاثیری نداشته باشد. لذا برای تغذیه بارهای غیرخطی، استفاده از سیستم تحریک AUX مانند سیستم تحریک PMG مناسب میباشد. در شکل (6) محل قرارگیری سیمپیچ جانبی در سیستم تحریک AUX مشخص شده است.
شکل 6- موقعیت سیمپیچ AUX در استاتور
خلاصه
برای سیستمهای تحریک ژنراتور، گزینههای متعددی وجود دارد که هریک مشخصات خاص خود را داشته و هر سیستم تحریک برای کاربریهای مختلف، مزایای منحصر به فردی فراهم میکند. برای کاربریهای ساده که دارای مصارفی مانند تغذیه چند الکتروموتور یا بارهای غیرخطی بوده و به دنبال کاهش هزینهها هستند، سیستم تحریک Shunt میتواند انتخاب مناسبی باشد. معمولا این سیستم تحریک مناسب ژنراتورهای کوچکتر میباشد. هنگامی که کاربری در نظر گرفته شده برای ژنراتور، راهاندازی چند الکتروموتور یا بهبود مشخصههای ولتاژ در لحظه استارت الکتروموتورها و یا تداوم پشتیبانی ولتاژ در هنگام اتصال کوتاه با هدف رعایت حفاظت انتخابی باشد، سیستم تحریک EBS انتظارات شما را با هزینهای کمتر نسبت به PMG برآورده میکند. برای اکثر کاربریهایی که احتیاج به راهاندازی الکتروموتورهای بزرگ، بهبود شرایط استارت موتورها، تغذیه بارهای غیرخطی و عملکرد مناسب و مطئن در هنگام وقوع اتصال کوتاههای شدید را دارند، سیستمهای تحریک PMG و AUX باید در اولویت قرار گیرند. استفاده از ژنراتور آهنربای دائم در سیستم تحریک PMG منبع توان AVR را از خروجی ژنراتور ایزوله کرده و یک توان ثابت برای AVR فراهم میکند. سیستم تحریک AUX با استفاده از هارمونیکهای ذاتی سیستم، ضمن کاهش ابعاد ژنراتور امکان حمایت از ولتاژ در هنگام وقوع اتصال کوتاه و راه اندازی الکتروموتورها را فراهم میکند. ارائه مزایایی همچون ایزوله کردن توان سیستم تحریک از خروجی ژنراتور، مناسب بودن برای تغذیه بارهای غیرخطی، ایجاد ولتاژ قدرتمند در هنگام راهاندازی ژنراتور به جای تکیه بر پسماند مغناطیسی و فراهم کردن امکان حفاظت انتخابی و پشتیبانی از ولتاژ در هنگام راه اندازی الکتروموتورها و وقوع اتصال کوتاه، باعث شده سیستم تحریک PMG انتخاب اول شرکت کامینز پاور در موتور ژنراتورهای ساخت این شرکت باشد.